Automatic Controls for Any Process
Chapter 5
Automatic Controls
Automation plays a really critical function in the development and promotion of any system. Automatic control refers to the control of any procedure, device or a system utilizing automatic agencies instead than manual control. Automation a system is done to better the public presentation and to increase the productiveness of the system. Automatic control has become an built-in portion in every field whether it is industry, robotics, vehicles, power workss, etc. to increase the productiveness, public presentation and efficiency of the system control systems are used to accomplish the mechanization. Control system fundamentally refers to the interconnectedness of the constituents to configure the system to bring forth the coveted end product.
Order custom essay Automatic Controls for Any Process with free plagiarism report
 450+ experts on 30 subjects
450+ experts on 30 subjects
 Starting from 3 hours delivery
Starting from 3 hours delivery
5.1 Types of Control System
There are fundamentally two types of control systems:

Figure 5.1 Basic types of Control systems
Closed cringle system is good than unfastened cringle system. The control system used for this undertaking is a closed cringle electronic control unit which can command the end product of the system.
5.2 Components of Control system
There are assorted constituents of control system that includes the procedure whose end product is to be controlled, informations acquisition unit, electronic control unit and end product devices.
5.2.1 Procedure
It is the basic constituent of the control system as this is the constituent whose end product is to be controlled utilizing the automatic control. So it is required to mathematically pattern the procedure to understand the behavior of the input and so bring forth the desired and controlled end product ( Mutambara Arthur 1999 ) .
Top of Form
Bottom of Form
5.2.2 Data Acquisition Unit
It is that unit of the system that can mensurate electrical or physical measure in the signifier of electromotive force, current, temperature, sound, etc. It by and large measures the parallel signal and so treat it utilizing signal conditioning or parallel to digital convertor. The physiological information from the detectors is send to the cardinal unit to be processed. PIC16f73 microcontroller is used as the nucleus of DAU and it performs the parallel to digital transition and so sends the processed end product signal to the end product device. PIC microcontroller is chosen as it provides the necessary functionalities needed to the user. Besides it has high velocity parallel to digital transition ability. PIC microcontroller is farther connected to liquid crystal show ( LCD ) , doorbell and a motor to expose the end product.
Basic constituents of DAQ unit:
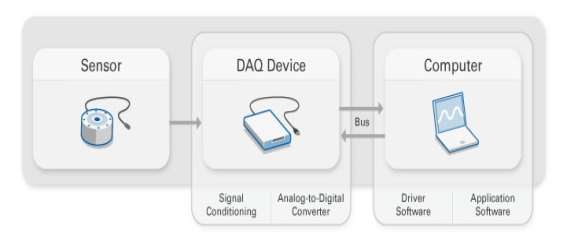
Figure 5.2 Components of DAQ unit ( What is data acquisition? 2014 )
Detector:
DAQ Device:
Computer System:
5.2.3 Electronic Control unit
The electronic control unit ( ECU ) controls the fuel system, ignition system and velocity of the engine. It chiefly consists of microprocessors or microcontrollers, random entree memory ( RAM ) , read merely memory ( ROM ) and input end product devices. Based on the information from the input detectors, the ECU determines the end product of the electronics circuit. It is considered as the encephalon of the control system as its work is to take the signal and bring forth the automatically controlled signal required by the end product. Microcontroller serves both the intent of informations acquisition and commanding the end products of the undertaking ( Vincent T, Ciulla 2002 ) .
5.2.4 Output Actuator
It is besides known as end product device that converts the electrical signal into some physical end product. It receives the controlled signal from the electronic control unit in the signifier of electrical signal. It is the device which influences the procedure of the system physically and forces the device to bring forth the coveted end product. The actuator applicable to this undertaking is motor that is used to bespeak the end product of the system.
This undertaking besides requires a control unit as the vehicle is automatically controlled in this system.
5.3 Types of electronic control
Three types of electronic controls are used majorly in any system ;

Figure 5.3 Types of Electronic Controls
Comparison between different types of controls is given in the following tabular array based upon their characteristics and public presentation. This comparing is drawn to find the best suited type of control to be used in this undertaking.
Table 5.1 Comparison between different types of controls
|
Microprocessor |
Microcontroller |
Programmable Logic Control |
|
A microprocessor works as a Central Processing Unit of a general intent computing machine. |
It can be considered as micro computing machine as all the constituents are embedded on a individual bit. |
It is a specialised system designed to command the industrial procedures and machinery. |
|
I/O ports, memory, timers, interrupts, etc are non inbuilt so they are connected externally. |
Microcontroller has all the excess peripherals like I/O ports, memory, timers, counters, interrupts, etc are built-in inside the bit merely. |
It has a programmable memory to hive away specific maps like on/off control, timers, counters, arithmetic and informations handling. It has limited figure of inputs and end products. |
|
Microprocessors based systems are bulky and really much expensive as it gives really high processing velocity. |
These are easy available and are less bulky and much cheaper than microprocessors. |
PLCs are usage programmed for merely peculiar undertakings so their hardware is really dearly-won and need regular care. |
|
But its drawback is that it has really few pins that are programmable. |
Most of the pins of microcontroller are programmable. |
It is a programmable logic control and uses ladder logic for scheduling. |
|
It can merely manage a few spots of instructions as it has really less built-in memory. |
It has inbuilt memory so it has many spots to manage instructions. |
It has really small memory which can manage few instructions. |
|
It is widely used in desktop computing machines and laptop, notepads, etc due to its high processing velocity. |
It has moderate processing velocity so it is widely used in little control systems, contraptions like oven, telecastings, etc. |
It is by and large used for industrial applications for automatic control of industrial machinery, procedure etc. |
|
Slightly big size due to excess peripherals and operates above 1Ghz. |
Small in size and operates from really few MHzs to 30-50 Mhz. |
Its size varies from little, medium to really big PLC panels. |
|
Examples of microprocessors are 8085, 8086, INTEL Pentium series, etc. |
Examples of microcontrollers are INTEL8051, PIC16f73, PIC16F877, etc. |
Examples of PLC are industrial control, industrial safety applications, etc. |
The research worker decided to utilize the microcontroller bit for the processing of detected signals because it is little in size, cheap and consumes less power. It does non necessitate any external input/ end product ports, memory, timers or interrupts as it has all these characteristics inbuilt in its internal architecture. Higher integrating of microcontroller besides reduces the cost and size of the system which serves the basic demand of the user every bit good as the research worker. PLC based systems are really much expensive to be used for this intent ( Basics of microcontrollers 2011 ) .
5.3.1 Choice of microcontroller for the undertaking
After make up one's minding the microcontroller it is of import to make up one's mind which microcontroller should be used in this peculiar undertaking that can outdo suit the demands of the undertaking. For this intent a comparing between different types of microcontroller is drawn in the undermentioned tabular array.
Table 5.2 Comparison of Different Microcontrollers
|
Properties |
PIC microcontroller |
Microcontroller 8051 |
AVR |
|
Direction Set |
It is based on RISC ( Reduced direction set calculation ) . It has merely 35 set of instructions that makes its architecture easy to larn. |
It is based on CISC ( Complex direction set calculation ) . It has a big figure of instructions about 250 instructions. |
It is besides based on RISC ( Reduced direction set calculation ) but it has big direction set i.e. non-orthogonal. It has about 140 instructions. |
|
Processing Speed |
It can treat 3 million instructions per second because in 1 machine rhythm of PIC, clock frequence is divided by 4. |
It can treat 1 million instructions per second because in 1 machine rhythm of 8051, clock frequence is divided by 12. |
It can treat 12 million instructions per second because in 1 machine rhythm of AVR, clock frequence is divided by 1. |
|
ADC |
Its velocity of parallel to digital transition is really fast than AVR’s. |
It does non hold inbuilt parallel to digital convertors like PIC and AVR. |
Its parallel to digital transition velocity is slower than PIC. |
|
Power ingestion |
It has least power ingestion. |
It consumes the most power out of all the three microcontrollers. |
It consumer higher power than PIC microcontroller. |
|
Programing |
It is really easy programmable IC as it really easy to code. |
Cryptography of microcontroller 8051 is besides easy. |
It has really complex cryptography for novices as compared to other two microcontrollers. |
|
Memory |
It has 8k brassy memory, 368?8 byte RAM. |
It has 256 byte internal RAM and 4k on-chip ROM. |
It has 8k byte flash memory, 1k byte RAM. |
|
Cost and Availability |
It is easy available in market and that excessively at low cost. |
It is besides low lost and easy available. |
It is dearly-won as compared to 8051 and PIC micro accountant and handiness is besides limited. |
As detectors are used in this undertaking so it is better to utilize a microcontroller with built-in ADC with fast transition velocity alternatively of utilizing separate ADC after every detection faculty. By maintaining this in head the research worker had studied the characteristics of assorted microcontrollers which can be used to implement the accident bar system and eventually reached to the decision of utilizing PIC ( Peripheral Interface Controller ) microcontroller.
Researcher decided to utilize PIC16f73 is used in the undertaking due to its high parallel to digital transition. The pin architecture of PIC16f73 is given figure 5.4.
5.4 Architecture of PIC16f73 microcontroller
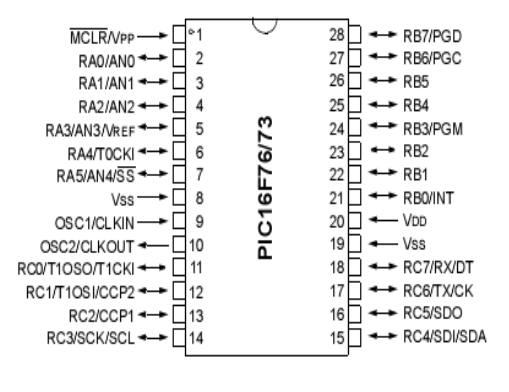
Figure 5.4 Architecture of microcontroller PIC16f73 ( Microchip 2002 )
It is a 28 pin IC and the coveted undertaking can be made utilizing 28 pins with 3 input end product ports. It has 192 byte RAM ( Random Access Memory ) and it is based on RISC architecture with merely 35 set of instructions. It has 8k brassy memory, 4k programmable memory and 368?8 byte RAM. It has 3 ports viz. port A, B and C. Port A consists of 5 parallel to digital channels for ADC transition. Assorted parametric quantities for choosing PIC16f73 microcontroller are listed below.
- Performance:PIC16f73 microcontroller which will be used in the execution of this undertaking is a 28 pin IC with 3 input-output ports. It besides has 192 bytes of RAM ( Random Access Memory ) and is based on RISC ( Reduced Instruction Set Computation ) architecture for better public presentation of the Accident Prevention System. It has much faster transition velocity of parallel to digital transition than other accountants.
- Power ingestion:A PIC controlled system has minimal power ingestion with good public presentation which is needed by the accident bar system. So this characteristic of PIC is really utile for the system being developed as the system would work on minimum power without compromising the system public presentation.
- Memory:The accident bar system utilizing intoxicant and oculus winking sensing can be done utilizing the built-in memory of PIC but still if the demand of memory of the system increases. PIC microcontroller besides has 4k programmable brassy memory and most of the PIC based systems are memory expandible and can spread out its memory as per use and type of application. To implement this system its built-in memory is adequate ( Bates Martin, 2011 ) .
Therefore from this chapter, the control unit used for this undertaking is finalized. This chapter gives a brief overview of assorted control devices. Comparison between different control systems is drawn. The justification for taking a peculiar control unit is besides given. The short account of microcontroller used is besides given in this chapter.
Now all the basic constituents to be used in the undertaking are decided. Therefore from the following chapter, design of circuitry and the system will be done. After that this system should be implemented and so tested.
Cite this Page
Automatic Controls for Any Process. (2018, Jul 22). Retrieved from https://phdessay.com/automatic-controls-for-any-process/
Run a free check or have your essay done for you
