Autonomous Caregiver Following Robotic Wheelchair
AUTONOMOUS CAREGIVER FOLLOWING ROBOTIC WHEELCHAIR
Abstract— In the last decennary, a assortment of robotic/intelligent wheelchairs have been proposed to run into the demand in aging society. Their chief research subjects are independent maps such as traveling toward some ends while avoiding obstructions, or user-friendly interfaces. Although it is desirable for wheelchair users to travel out entirely, health professionals frequently accompany them. Therefore we have to see non merely independent maps and user interfaces but besides how to cut down caregivers’ burden and back up their activities in a communicating facet. From this point of position, we have proposed a robotic wheelchair traveling with a caregiver side by side based on the MATLAB procedure. In this undertaking we discoursing about robotic wheel chair to follow a health professional by utilizing a microcontroller, Ultrasonic detector, computer keyboard, Motor drivers to run automaton. Using camera interfaced with the DM6437 ( Davinci Code Processor ) image is captured. The captured image are so processed by utilizing image processing technique, the processed image are so converted into electromotive force degrees through MAX 232 degree convertor and given it to the microcontroller unit serially and supersonic detector to observe the obstruction in forepart of automaton. In this automaton we have mode choice switch Automatic and Manual control of automaton, we use supersonic detector in automatic manner to happen obstruction, in Manual manner to utilize the computer keyboard to run wheel chair. In the microcontroller unit, hundred linguistic communication cryptography is predefined, harmonizing to this coding the automaton which connected to it was controlled. Robot which has several motors is activated by utilizing the motor drivers. Motor drivers are nil but a switch which ON/OFF the motor harmonizing to the control given by the microcontroller unit.
Keywords:Code Composer studio,Robotic Wheelchair.
Order custom essay Autonomous Caregiver Following Robotic Wheelchair with free plagiarism report
 450+ experts on 30 subjects
450+ experts on 30 subjects
 Starting from 3 hours delivery
Starting from 3 hours delivery
- Introduction
Harmonizing to the World Health Organization ( WHO ) , between the 7 and 10 % of the population worldwide suffer from some physical disablement. This nose count indicates that the most common disablement is motor, followed by sightlessness, hearing loss, rational, and linguistic communication.
Many people who suffer from chronic mobility damages, such as spinal cord hurts or multiple induration, utilize a powered wheelchair to travel around their environment. However, factors such as weariness, devolution of their status, and centripetal damages, frequently limit their ability to utilize standard electric wheelchairs.
This undertaking aims at developing—in coaction with applied scientists and rehabilitation clinicians—a paradigm of a multi-functional intelligent wheelchair to help persons with mobility damages in their day-to-day motive power, while minimising physical and cognitive tonss.
In Existing system the control is utilizing computer keyboard or person has to assist in traveling the wheel chair and here we introduce a new technique in this we can track the caregiver’s organic structure orientation by sing its form so that the wheelchair can do a bend when the health professional is traveling to alter his/her traveling way. Based on these observations of the health professional, our wheelchair can travel with the health professional side by side.
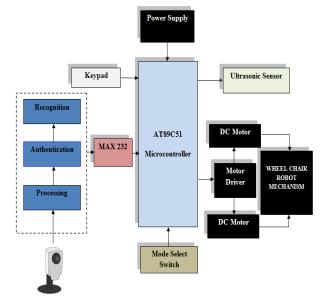 . Fig1. System Overview
. Fig1. System Overview
The coveted codification can be fed into DM6437 via CCS and consequence can be viewed in matlab. In the following subdivision, the execution of tracking algorithms will be presented. Section III proposes the algorithm with Davinci codification processor and robotic system. Decision is given in subdivision IV.
- Peoples DETECTION AND TRACKING
Initially connect web camera to the processor. From the picture 2 back-to-back snapshot will be taken with 2sec hold. Both the images will be converted from RGB to grey. The obtained images will hold noise. In order to take the noise Weiner filter is used. Then the filtered grey image will be converted in to grey Binary Image in which ROI is separated.
From the binary image Region belongingss will be extracted. In this undertaking major axis length and orientation are extracted. These belongingss will be compared for both the images. Based on the conditions, the bids will be sent to the robotic wheelchair through consecutive port. The stairss followed in algorithm is,
First we take two images automatically one by one with some hold.
Convert both colour images to grey images by utilizing rgb2gray bid.
Use wiener2 filter for taking gesture fuzz in both images because object is in traveling place so camera generate blurred image.
Convert that wiener filtered images to binary images.
Apply regionprops technique to binary images for ciphering majoraxislength, orientation ( angle ) .
Here we are utilizing both instances such as majoraxislength for ciphering length of image and orientation for angle of image.
After acquiring place of object that will be automatically sended to embedded kit ( wheel chair ) through consecutive port utilizing consecutive bid.
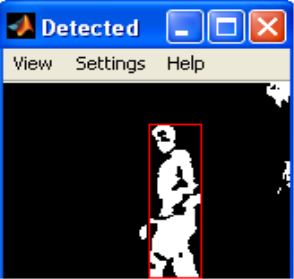
Fig2. Detecting Region of Interest
- ALGORITHM WITH DM6437 AND ROBOTIC SYSTEM
Therefore the generated matlab plan has been fed into the davinci codification processor. This is done by change overing matlab codification in to c codification. The generated degree Celsius codification will be injected in to the processor utilizing Code Composer Studio.

Fig3. DVM6437 with supplied electromotive force and USB connexion

Fig 4. MATLAB coding

Fig5. Connecting with CCS
- A Robotic constellation.
The paradigm system can be implemented utilizing the TMS320DM6437 EVM board, the Robot, and a picture camera. The EVM board includes a DM6437 DSP with a UART consecutive port, composite picture inputs and end products, and many other peripherals.

Fig6. Robotic Circuit
The EVM board can be mounted above the robotic system.
A gripper can be built, to attach the picture camera to the system, and avoid camera quivers, that can be caused by the automaton 's motion.
- Maestro system.
The maestro system includes the robotic faculty. Thus the TI DSP processor can be interfaced to robotic faculty by agencies of UART. The robotic system can be configured with 89C51, DC brushless motors ( 45 revolutions per minute ) , detectors for the obstructions sensing and UART for the external. This microcontroller enforce greater versatility with the option
for Embedded Web waiter application, so that system can be monitored from the distant location.
Therefore configuring the system utilizing UART would intend that the DSP would move as slave and it would the feed the boot information to the maestro device ( 89C51 ) , when they need information. Thus the maestro would have the picture information, sing which object demand to be tracked from the slave ( DSP ) and there by the coveted one would be tracked. Thus the presented algorithm would roll up the belongingss of the coveted object, which would voyage the slave for tracking.
Based on the place of the Object ( Caregiver ) , the bids will be sent to microcontroller through the consecutive port. Depending on the standard bids, the action will be taken topographic point.
The bids and it’s control action for automaton, is given in tabular array.
TABLE1: DECISION MAKING TABLE BY ROBOT
|
S.No |
Command |
Robot motion |
|
1 |
4 |
Left |
|
2 |
6 |
Right |
|
3 |
8 |
Forward |
|
4 |
5 |
Stop |
The relationship between the maestro and break one's back device is depicted as province flow chart in the figure7





|
|
||||||

|
||||||
Fig7. Flow of mechanism between district attorney vinci and robotic system









Fig8. Robotic Wheelchair Prototype
- Decision
In this paper, a new algorithm is presented, to do the wheelchair to follow health professional. The algorithm is verified for a set of picture. It reduces the physical work and caregiver’s burden. The proposed architecture has to be implemented.
- Mentions
[ 1 ] Veenman, C. Reinders, M. , and Backer, E. 2001. Deciding gesture correspondence for dumbly traveling points, IEEE Trans. Patt. Analy. Mach. Intell. 23, 1, 54–72.
Serby, D. , koller clemency, S. , AND Gool L. V. 2004. Probabilistic object tracking utilizing multiple characteristics. In IEEE International Conference of Pattern Recognition ( ICPR ) . 184–187.
Comaniciu, D. , Ramesh, V. , Andmeer, P. 2003. Kernel-based object trailing. IEEE Trans. Patt. Analy. Mach Intell. 25, 564–575.
Yilmaz, A. , LI, X. , AND Shah, M. 2004. Contour based object tracking with occlusion managing in picture acquired utilizing nomadic cameras. IEEE Trans. Patt. Analy. Mach. Intell. 26, 11, 1531–1536.
Pashcog, G. 2001. Perceptually unvarying colour infinites for colour texture analysis: an empirical rating. IEEE Trans. Image Process. 10, 932–937.
Canny, J. 1986. A computational attack to inch sensing. IEEE Trans. Patt. Analy. Mach. Intell. 8, 6, 679–698.
HORN, B. AND SCHUNK, B. 1981. Determining optical flow. Artific. Intell. 17, 185–203.
Kanade, T. , collins, R. , Lipton, A. , Burt, P. , AND Wilson, L. 1998. Progresss in concerted multi-sensor picture surveillance. Darpa IU Workshop. 3–24.
Wren, A. Azarbayejani, T. Darrell, and A. Pentland, “Pfinder: Real-time trailing of the human organic structure, ” IEEE Transactions on Pattern Analysis and Machine Intelligence, vol. 19, pp. 780-785, 1997.
A. Monnet, A. Mittal, N. Paragios, and V. Ramesh, “Background mold and minus of dynamic scenes, ” Oct. 2003, pp. 1305-1312 vol.2.
[ 11 ] M. Irani and P. Anandan, “Video indexing based on Mosaic representations, ” Proceedings of the IEEE, vol. 86, no. 5, pp. 905-921, May 1998.
[ 12 ] X. Gao, T. Boult, F. Coetzee, and V. Ramesh, “Error analysis of background adaptation, ” vol. 1, 2000, pp. 503-510 vol-1
P.1
Cite this Page
Autonomous Caregiver Following Robotic Wheelchair. (2018, Jul 29). Retrieved from https://phdessay.com/autonomous-caregiver-following-robotic-wheelchair/
Run a free check or have your essay done for you
